オムロン株式会社(本社:京都市下京区、代表取締役社長CEO:辻永順太、以下 オムロン) 技術・知財本部と、オムロン サイニックエックス株式会社(本社:東京都文京区、代表取締役社長 CEO:諏訪正樹、以下 OSX)は、ロボティクス領域の主要国際会議2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (以下 IROS 2023)に4件(技術・知財本部 1件、OSX 3件)の論文が採択されました。各成果の詳細は、2023年10月1日から10月5日まで米国デトロイトにて開催される同国際会議にて発表を行います。
「IROS」はロボット技術に関する世界最大規模の国際会議の一つです。2023年は2,760件の投稿の中から、43.3%の論文が採択されています。
技術・知財本部とOSXでは、人を中心とした人と機械が融和する未来を目指し、研究を行っております。今回の発表は、ロボットを安全に動作させるための高速計算アルゴリズム、柔軟な身体を持ち自律的に組立学習を行うロボット、化学実験や材料科学実験などの自動化に関するロボット技術の研究成果について行います。
これらの研究成果の中には、社会実装に向けて積極的に活用いただくために、わかりやすく技術を解説する記事やGitHubでオープンソースコードとして公開している成果もあります。詳細は、それぞれの論文内容のリンクからご確認ください。
今後も、技術・知財本部では、オムロンが目指す「人が活きるオートメーション」の実現に向け、「センシング&コントロール+Think」技術により社会的課題の解決を加速してまいります。また、OSXでは、大学や社外研究機関との共同研究、インターンシップの採用を通して、技術革新による価値創出に取り組んでまいります。
<技術・知財本部の採択論文> ※発表日時はいずれも現地時間です
「ITIRRT: A Decoupled Framework for the Integration of Machine Learning into Path Planning」
|
著者 |
Thibault Barbie (OMRON), Shigeharu Mukai (OMRON) |
|
発表日時 |
10/4(水) 14:36-14:42 / 15:30-17:00 |
|
概要 |
多関節ロボットに人や周囲の物体との衝突を回避させ、安全な動作を実現させるためには、その動作の経路計画が重要です。しかし、複雑な動作を実現しようとすると、経路計画の計算に多大な時間を要するため、実世界での適用に課題がありました。この課題に対し、機械学習ベースのアルゴリズムも検討されていますが、数学的に成功を保証することは困難でした。本研究では、経路計画を機械学習による予測フェーズと経路探索フェーズに切り分けるフレームワークを提案しました。これにより、予測された経路を一案として経路探索を行うことで、成功を保証しつつも、短時間で経路計画を計算できます。さらに、本フレームワークはシンプルな構造であり、任意の機械学習モデルを統合することも容易にしました。 |
|
詳細 |
10/1公開予定 |
本採択論文は、新たな価値創出につなげるための技術の事前調査・検証を支援する技術・知財本部独自の制度である「技術トライアル」を通して行った、ロボティクス技術分野での研究成果です。
※技術トライアル:https://www.omron.com/jp/ja/edge-link/news/676.html
<OSXの採択論文> ※発表日時はいずれも現地時間です
「Learning Robotic Powder Weighing from Simulation for Laboratory Automation」
|
著者 |
Yuki Kadokawa (Nara Institute of Science and Technology, 2022年4月から2022年9月の間OSXインターン), Masashi Hamaya (OSX), Kazutoshi Tanaka (OSX) |
|
発表日時 |
10/2(月) 14:18-14:24 / 15:30-17:00 |
|
概要 |
化学実験など研究室での作業の自動化に向けて、ロボットのさじ操作によるミリグラム単位での粉体秤量作業の実現が求められています。粉体の流動的な挙動と、材料間で流動性が大きく異なる点を考慮するために、機械学習を利用して秤量動作を実現したいと考えました。しかし、実世界でのデータ収集は、学習過程において粉体が散乱し、作業環境の清掃に大きな労力を要するため現実的ではありません。本研究では、ドメインランダマイゼーションを用いたSim-to-Real転移学習を採用し、さじ操作による粉体秤量作業を強化学習として定式化しました。実験により、異なる材料の粉体に対しても、実世界での追加学習なしで、高精度な粉体秤量の実現を確認しました。これにより、実世界でのデータ収集が全く必要なく、粉体の重量変化を観察して秤量できるロボットを実現しました。 |
|
詳細 |
 シミュレーションからロボットによる粉体秤量を学習する研究に関してIROS2023で発表します 本研究は、ロボティクス分野のトップ会議の一つである、2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)に採択されました (採択率43.3%)。 medium.com  Learning Robotic Powder Weighing from Simulation for Laboratory Automation employs a sim-to-real transfer learning approach using a domain randomization (DR) technique for robotic powder weighing. omron-sinicx.github.io |
「Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing」
|
著者 |
Joaquín Royo-Miquel (OSX, 2022年1月から2023年3月の間OSXインターン), Masashi Hamaya (OSX), Cristian Camilo Beltran-Hernandez (OSX), Kazutoshi Tanaka (OSX) |
|
発表日時 |
10/3(火) 14:36-14:42 / 15:30-17:00 |
|
概要 |
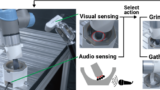
本研究は、部品の把持姿勢と挿入部品の目標位置にばらつきがある不確実な環境下でのロボットによる部品組立の実現を目指します。このような状況では、ロボットが環境を認識し、ばらつきに対して適応しながら動作することが求められます。本研究では、物理的に柔軟な手首と触覚センサを搭載したロボットが、環境を探りながら組立を遂行する手法を提案しました。物理的に柔軟な手首は安全な接触や探りを許容し、触覚センサは挿入する部品が穴に触れたときの手応えをとらえることができます。結果としてロボットはより頑健に組立を遂行することができます。本手法により、ロボットは不確実な環境でも動作できるため、入念な環境設定が不要となります。これにより、ロボットの立ち上げにかかる労力が大幅に軽減され、より実装が容易なロボットの普及に貢献することが期待できます。 |
|
詳細 |
 触覚センサと物理的に柔軟な身体を持つロボットによる部品挿入学習に関する研究をIROS2023で発表します 本研究はロボティクス分野のトップ会議の一つである、2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)に採択されました(採択率 43.3%)。 medium.com  Learning Robotic Assembly by Leveraging Physical Softness and Tactile Sensing develop an anomaly detection model using a Variational Autoencoder to identify the timing of these transitions and employ learning and heuristic-based controlle... omron-sinicx.github.io |
「Robotic Powder Grinding with Audio-Visual Feedback for Laboratory Automation in Materials Science」
|
著者 |
Yusaku Nakajima (SOKENDAI), Masashi Hamaya (OSX), Kazutoshi Tanaka (OSX), Takafumi Hawai (Osaka University), Felix Wolf Hans Erich von Drigalski (Mujin Inc.), Yasuo Takeichi (Osaka University), Yoshitaka Ushiku (OSX), Kanta Ono (Osaka University) |
|
発表日時 |
10/4(水) 9:18-9:24 / 10:00-11:30 |
|
概要 |
材料科学実験では、試料を準備するために、粉体を粉砕する作業が必要です。しかし、実験で必要となる数グラム程度の粉体を所望のサイズまで粉砕するには、人手による多大な労力と時間を要することが課題でした。この課題に対し、我々が以前に開発したロボット粉体粉砕システムでは、視覚情報により乳鉢内の粉体の広がりを認識し、粉体を集めるか粉砕を進めるかを自動的に判断し、粉体粉砕の効率を向上させました。しかし、視覚情報のみでは粉砕作業中の粒子サイズを判断しづらく、粉体を所望のサイズまで粉砕しきれない場合がありました。本研究では、視覚情報に加えて音情報も取り入れたマルチモーダルなロボット粉体粉砕システムを提案しました。本システムでは新たに、音の強度により粉体の粒子サイズを推定し、粉砕の進行状況を判断しながら適切な粉砕作業を行うことができます。実験結果より、音と視覚のマルチモーダルな情報を利用することで、粉体の粒子サイズをこれまで以上に小さく粉砕でき、粉体粉砕効率の向上を確認しました。本システムは、材料科学実験における少量多品種の試料準備や、粉体粉砕プロセスの解析に貢献します。 |
|
詳細 |
 音と画像を活用したロボット粉体粉砕に関する研究をIROS2023で発表します オムロンサイニックエックスと大阪大学小野研究室の共同研究において、材料科学自動化のための、ロボット粉体粉砕に関する論文が、2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS… medium.com 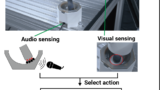 Robotic Powder Grinding with Audio-Visual Feedback for Laboratory Automation in Materials Science present a multi-modal robotic grinding system that utilizes both audio and visual feedback omron-sinicx.github.io |
技術・知財本部について
オムロングループのコーポレートR&D部門として、コア技術である「センシング&コントロール+Think」を進化させながら、近未来に起こりうる社会的課題を先取りし、それらを解決するソーシャルニーズの創造に取り組んでいます。創業者の経営理念「機械にできることは機械に任せ、人間はより創造的な分野で活動を楽しむべきである」を拠り所に、人の可能性を広げ、人がもっと活躍できる未来の実現を目指し、AI・ロボティクス・エネルギーマネジメント・センシングなどさまざまな研究開発活動をおこなっています。詳細については、https://www.omron.com/jp/ja/technologyをご覧ください。
オムロン サイニックエックス株式会社について
オムロン サイニックエックス株式会社は、オムロンの考える”近未来デザイン”を創出する戦略拠点です。「AI」「ロボティクス」「IoT」「センシング」など、幅広い領域の最先端技術のトップ人財が研究員として在籍し、社会的課題を解決するために、技術革新をベースに「ビジネスモデル」「技術戦略」「知財戦略」を統合し具体的な事業アーキテクチャに落とし込んだ”近未来デザイン”を創り出します。また、大学や社外研究機関との共同研究を通じて「近未来デザイン」の創出を加速していきます。詳細については、https://www.omron.com/sinicx/をご覧ください。