◆複数メーカーのロボットに対応する接続方式を採用、今後も順次拡張予定
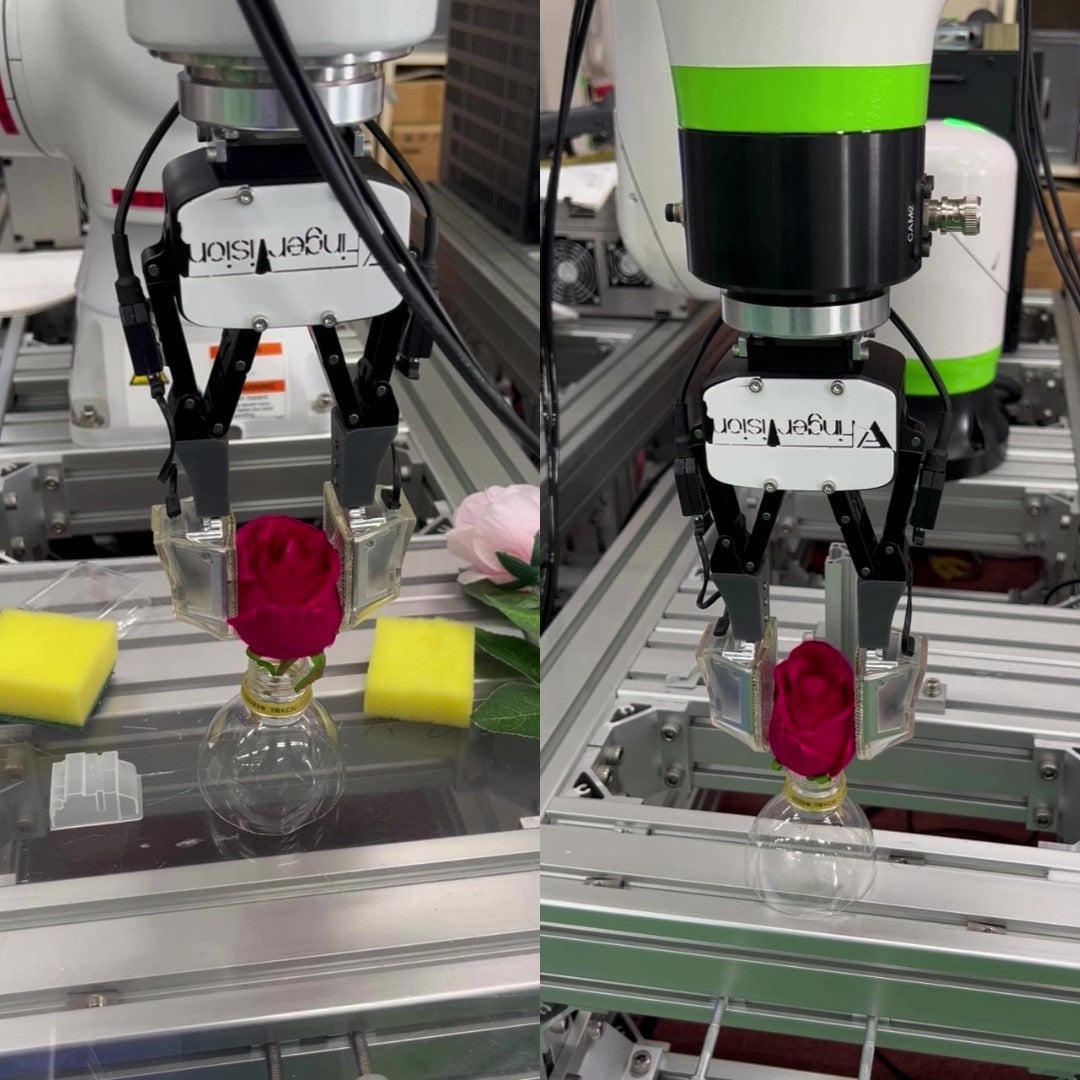
触覚センサ付きロボットハンド(α版)に対応する初期的な接続方式として、複数メーカーのロボットへの接続が可能なModbus/TCPを実装しました。協働ロボットを例にとると、
・ファナックCRX
・安川電機HC10
・Universal Robots e-series
・Techman Robot TM Robot Series
・NEURA ROBOTICS
などでの接続が可能になります。
・接続動画(ファナック):https://twitter.com/Yuki_Nono_fv/status/1679406380095258624
・接続動画(安川電機):https://twitter.com/Yuki_Nono_fv/status/1679788077018132483
2023年7月27日には、日本ロボットシステムインテグレータ協会主催の「新製品・サービス説明会」でも本製品を展示・説明を行い、好評を頂きました。今後もロボットシステムインテグレータ様をはじめとする皆様にとって、触覚センサ付きロボットハンドを活用したアプリケーションを実装・開発するための環境整備を進めて参ります。
・日本ロボットシステムインテグレータ協会 https://www.farobotsier.com/
◆FingerVisionの食品業界向け「おかず盛付ロボット」が内閣府首相官邸SNSで「日本を代表する革新的技術」として掲載
FingerVisionは、アプリケーションの実装・開発環境の整備を進めるとともに、自社としても触覚センサを活用したロボットシステムの開発・導入を進めています。2023年7月25日には、日本の魅力、文化、技術などを発信する内閣府首相官邸公式SNSアカウント「JAPAN GOV」で当社触覚・ロボット技術がG7向けに紹介されました。
■Facebook:https://www.facebook.com/JapanGov/videos/2279076372275880/
■Twitter/X「The Gov’t of Japan」:https://twitter.com/JapanGov/status/1683742796879134721?s=20
■Twitter/X「japan」:https://twitter.com/japan/status/1683742796635860992?s=20
■Youtube:https://www.youtube.com/watch?v=1fxm74GOYdk
今後も食品業界をはじめとした様々な業界・用途におけるロボットシステムの開発・導入を加速させます。
◆直近の展示会出展予定
① FOOD展2023 (2023.9.20~9.22@東京ビッグサイト)
② JAPAN PACK 2023 日本包装産業展(2023.10.03~10.06@東京ビッグサイト)
③ 国際ロボット展iREX2023 (2023.11.29~12.02@東京ビッグサイト)
◆会社概要
・社名: 株式会社FingerVision
・代表取締役: 濃野友紀
・開発拠点:
・東京都文京区本郷3丁目39-17 KOGAビル3階
・京都府京都市下京区朱雀宝蔵町73-1 ライトワンビル1F
・資本金等: 104百万円 (資本準備金含む)
・設立: 2021年10月
・URL: https://www.fingervision.jp/
・YouTube: https://www.youtube.com/channel/UCRgZuTJvDxjD_7ta03BRQFA
・LinkedIn: https://www.linkedin.com/company/fingervision/
・Twitter/X: https://twitter.com/Yuki_Nono_fv
当社のロボットシステム・技術にご興味がございましたら、お気軽にお問合せ下さい。
・メール:contact@fingervision.jp
◆技術概要
「画像(カメラ)をベースに触覚を再現する」というコンセプトをコア技術としています。ロボットハンド等の指先に搭載することで、触覚(力や滑りの分布等)を知覚できるようになり、あたかも人が「手のひら」の感覚を使って物体を扱うような制御をロボットで実現できます。高機能(高分解能・マルチモダリティ)でありながら、経済性に優れる実用性の高さが特徴です。「触覚」センサとは言いつつも、把持対象物を見る(視覚)モダリティも備えた、まったく新しいコンセプトの「視触覚センサ」であり、ロボットと組み合わせたプロセス自動化だけでなく、無限の応用可能性を持ちます。