マップフォーは、三次元データ収集・データ作成の効率性と精度を向上することでユーザー様の測量に係る課題を解決し、測量をはじめとするより広い分野での空間情報の取得・活用を推進していきます。

1. 公共測量を効率化
公共測量では、従来、TS(トータルステーション)やTLS(地上型レーザースキャナー)等の器械を用いて建物や地形の測量が行われてきました。TSやTLSを用いた平板測量では、測量面への器械やターゲットの設置作業に複数人の測量士が必要でした。測量時には、計測地点ごとにTSやTLS、ターゲットの移動設置作業に多くのコストがかかっていました。
しかしながら、LiDAR SLAMによる三次元データの取得と同時位置推定技術を組み合わせ開発した3Dマッピング用歩行データ計測システム「SEAMS」は、器械やターゲットの設置が不要で、全方位を対象とした歩行測量により地形や建物の3次元情報を高精度に取得できます。オープンスカイ環境であれば、15分間の連続歩行計測でも要求精度5cmを満たした測量が可能であるため、従来手法と比較して作業の大幅な効率化を実現できます。また、計測時に「SEAMS」と測量面との物理的接触が不要であるため、河川や堤防など、測量面への器械やターゲットの設置に不安がある場所でも安全で効率的な測量作業が可能です。
さらに、「SEAMS」で取得した計測データは三次元点群作成ソフトウェア「MAP IV Engine」(当社開発・提供)とシームレスに連携でき、計測したデータから高精度3次元地図を作成することが可能です。

■システム利用メリット
-
平板測量時に1人でデータ計測可能
-
歩行でのデータ計測による測量作業スピードの向上
-
TSやTLSを設置しにくい地形や環境でも歩くだけで計測可能
-
計測と同時に取得しているGNSS情報を利用して絶対座標付与が可能
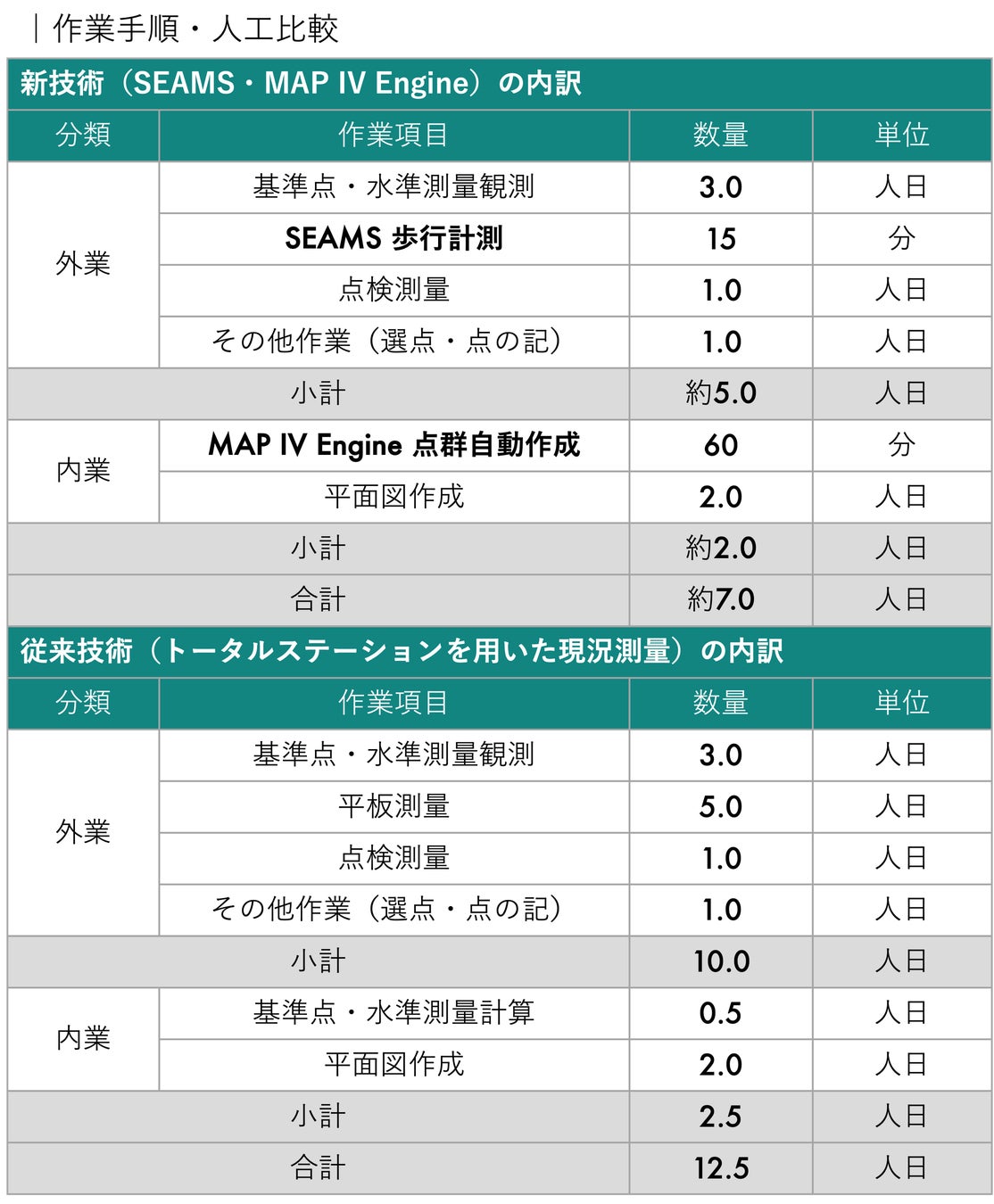
■測量作業工数を44%削減
TSを用いた測量で12.5人日かかっていた作業は、SEAMS+MAP IV Engineを使用することにより約7人日で完了させることができます。作業時間を大幅に短縮し、人件費を抑えることができます。

作業工数比較
2. 精度検証
今回、国土地理院の「LiDAR SLAM技術を用いた公共測量」マニュアルに則り「SEAMS」の計測精度検証試験を実施しました。
結果、公共測量のうち出来形測量・起工測量の要求精度に満足し、同マニュアルの技術要件に準拠することを確認できました。
■「LiDARSLAM技術を用いた公共測量マニュアル」とは
2023年3月、国土地理院は「LiDAR SLAM技術を用いた公共測量マニュアル」を改定しました。同マニュアルでは、LiDAR SLAM技術を用いたレーザスキャナによる測量データの作成・点検の作業手順、および、点群データの要求精度が規定されています。点群データの要求精度は、出来形測量ではXYZの各成分において±5cm以内、起工測量ではXYZの各成分において±10cm以内です。
■ 検証手順
標定点検査:標定点での水平精度・標高精度を検査
検証点検査:検証点での水平精度・標高精度を検査
斜距離検査:任意2点間の斜距離との較差精度を検査
■ 計測環境

市街地での計測環境(全長約800m) ※標定点は四隅の白点4点
■ 結果
SEAMSを用いて15分間歩行データ計測を行い、MAP IV Engineを用いて、計測したデータから点群を作成し、点群の標定点による後処理補正を実施しました。
検証点における比較結果は次のとおりです。
XYZいずれの成分においても、マニュアルで規定されている要求精度誤差±5cm以内の結果を示すことができました。
※RMS: 二乗平均平方根
検証点精度誤差
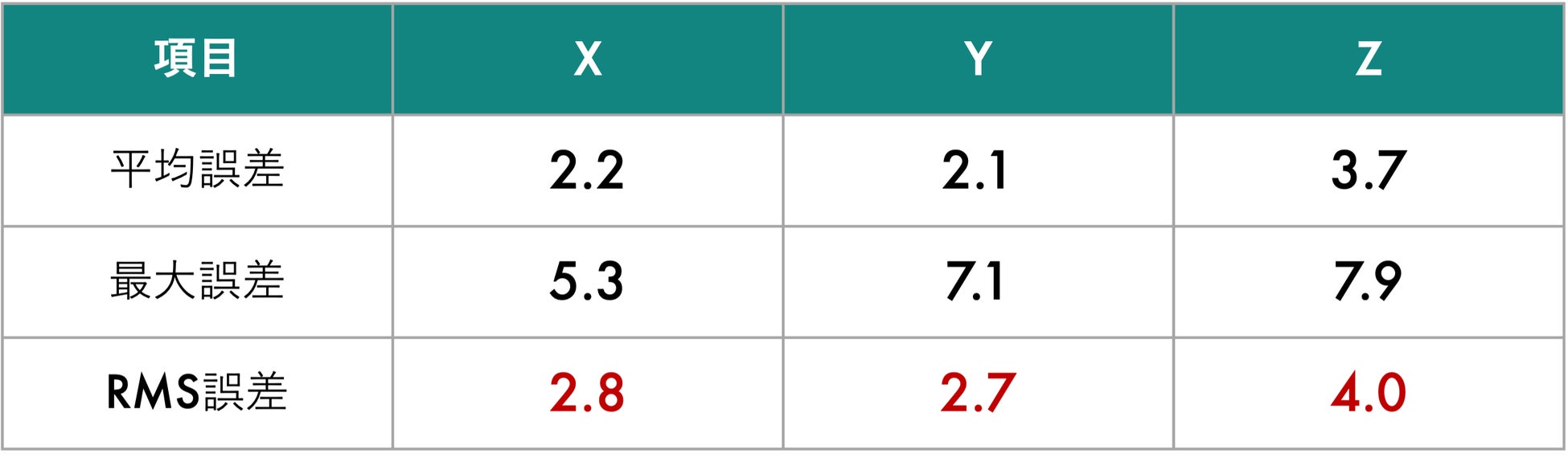
検証点: 20 単位: cm
斜距離較差精度誤差

点検数: 8 単位: cm
3. 製品紹介
■「SEAMS」とは
3次元マッピング用のデータ計測システムです。計測環境に合わせてバックパック型、車載型、手持ち型のラインナップから選択いただけます。バックパック型・手持ち型は軽量・コンパクトで可搬性に優れ、屋内外を問わず計測可能です。広域計測で地図情報レベル250の精度に準拠しています(水平位置の標準偏差:0.12m以内)。

■「MAP IV Engine」とは
3D LiDAR SLAMを用いた高精度・高速3次元地図作成ソフトウェアです。「SEAMS」の計測データや、ユーザーが取得したLiDARデータを用いることで、自動運転システム、インフラ保全、AR/VR、建築土木等の幅広いアプリケーションに利用可能な3次元点群を作成できます。
2020年12月にv.1.0をリリースし、現在、自動車メーカー、通信事業者、地図・測量事業者等、多くのユーザー様にご利用いただいています。また、MAP IV Engineを用いた100箇所以上の3次元地図作成実績がございます。
4. 会社紹介
マップフォーは、3次元地図作成技術・位置推定技術を社会実装する目的で2016年に設立された名古屋大学発のディープテック・スタートアップです。「社会の変革と創造へ、技術で導く。」をビジョンに、自動運転技術を中心とした幅広い分野に、実世界のあらゆる3次元空間情報の認識技術「空間知能」を提供しています。
高精度3次元地図作成ソフトウェア「MAP IV Engine」、環境認識ソフトウェア「Atomic Engine」、3次元データ計測システム「SEAMS/SEAMS LV」を開発・提供しています。
5. 問い合わせ先
〒460-0003 愛知県名古屋市中区錦2-19-1 名古屋鴻池ビルディング2階
株式会社マップフォー 広報担当
Email:contact@map4.jp