- 実証実験の背景
エアモビリティ株式会社(東京都港区、代表取締役社長&CEO 浅井尚)は、令和2年11⽉4⽇に東京海上日動火災保険株式会社、三重県との間で、空⾶ぶクルマに係る実証実験ならびに、実⽤化に向けた支援に関する包括協定を締結しております。
今回はその取り組みの一環として、令和5年2月6日、三重県鳥羽市にて、空のナビゲーションシステム「AirNavi」と離着陸場システム「IVport」の実用化に向けてドローンを使用した実証実験を実施いたしました。
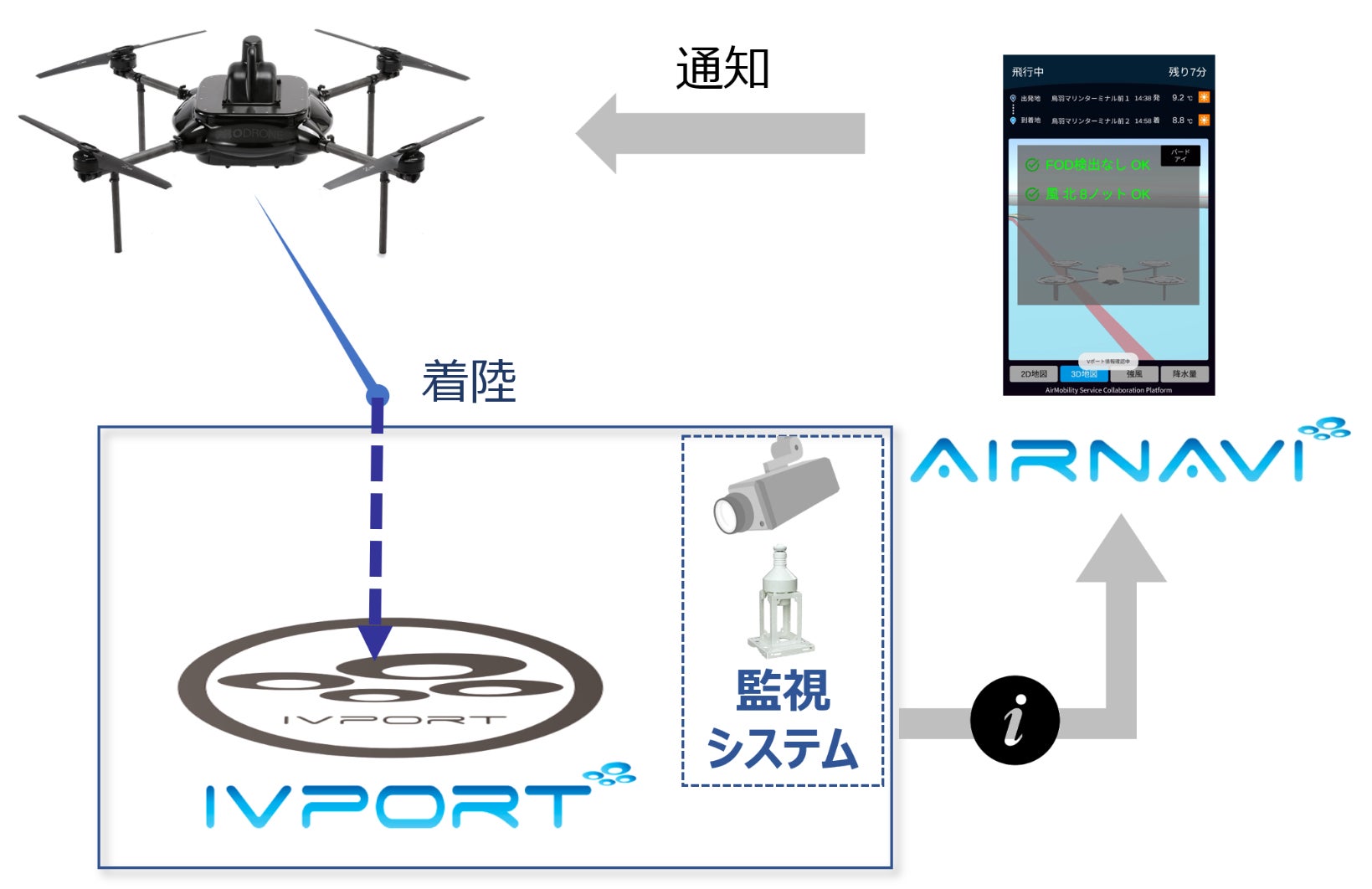
・AirNaviの画面とIVPortのイメージ図
- 実証実験の概要
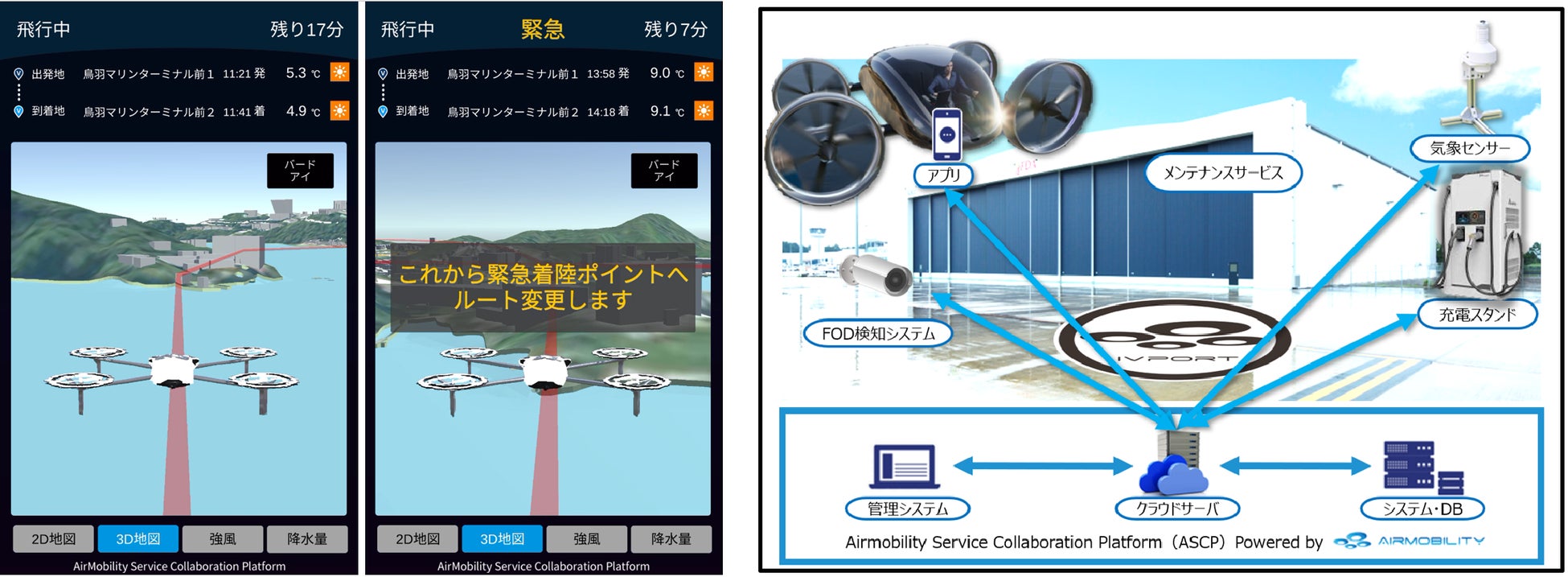
エアモビリティ株式会社が開発する、空飛ぶクルマのインフラプラットフォーム「AirMobility Service Collaboration Platform(ASCP)」の主要機能である空のナビゲーションシステム「AirNavi」を、空飛ぶクルマを想定したドローンに搭載して実証実験を行いました。
「AirNavi」とは、ルート設定などのナビゲーション機能をはじめ、リアルタイムの気象情報、離着陸場の情報など様々な条件を取り込み、空⾶ぶクルマの安全な運航を支援するものであり、今回の実験では同じくASCPの主要機能である離着陸場システム「IVport」を使って、正常着陸運航と緊急着陸運航の2つの機能確認を実施しました。
- 実証実験の内容
1)空飛ぶクルマに見立てたドローンと「AirNavi」の安全運航に関するシステム連携について実験を実施しました。
2)「AirNavi」 と「IVport」が連携して作動する緊急着陸機能について実験を実施しました。
① 正常着陸運航
AirNaviに登録されたルート通りにGPSから位置情報を取得し目的地に向かって飛行を実施。目的地に近づいた上空でAirNaviからIVportに対して着陸前確認としてセンサー情報(異物の有無と風向・風速)の確認。IVportからの着陸に関わるセンサー情報を取得したのちAirNaviで着陸可否を判断し安全な着陸を行いました。
② 緊急着陸運航
AirNaviに登録されたルート通りにGPSから位置情報を取得し目的地に向かって飛行を実施。飛行中に目的地の着陸場に障害物を設置。目的地に近づいた上空でAirNaviからIVportに対して着陸前確認としてセンサー情報を確認。着陸に関わるセンサー情報をIVportからAirNaviに返答。AirNaviは着陸不可否を判断し、新たに緊急着陸先に機体を誘導し、安全に着陸を行いました。

■実証実験日
令和5年2月6日(月)
■場所
三重県鳥羽市 鳥羽マリンターミナル(かもめ広場)
(三重県鳥羽市鳥羽一丁目2383番地51)
■実証実験飛行ルート
鳥羽マリンターミナル周辺海域の下記飛行ルートにて実施。
青:正常着陸ルート
黄:緊急着陸ルート
 ※国土地理院の空中写真上に飛行ルートを記載
※国土地理院の空中写真上に飛行ルートを記載
■使用機体
プロドローンPD4B-M
「物資輸送BOX」を連結し、AirNaviアプリ用のタブレットや通信機器などを搭載しました。

■本実証事業協力企業(順不同)
・東京海上⽇動⽕災保険株式会社(保険関連提供)
・株式会社プロドローン(ドローン提供)
・パナソニックコネクト株式会社(人物検知システム提供)
・株式会社ウェザーニューズ(気象センサー提供)
・株式会社⻑⼤(Vport提供)
・株式会社ゼンリン(3D地図データ提供)
・三重県(実証実験会場提供・各種ご支援)
【会社概要】
エアモビリティ株式会社
空飛ぶクルマの販売やサービスに関するシステムインフラをプラットフォーム上に構築し、空飛ぶクルマの運航に関するサービスをワンストップで提供することを目的として、2019年8月1日に設立されました。インフラプラットフォームのコアシステムである「AirMobility Service Collaboration Platform(ASCP)」を自社開発し、ナビゲーションシステムや離着陸場システム等と連携させて、空飛ぶクルマが正確かつ安全に運航できるようサービスを提供します。
URL:https://airmobility.co.jp/
【本件に関するお問い合わせ】
担当:長瀬・林
TEL:03-6273-1288
メール:info@airmobility.co.jp