<近接覚センサー機能評価用サンプルの仕様>
| 計測内容 | 測距、測角 |
| 計測距離レンジ | 1.5~20.0mm |
| 計測角度レンジ | -20.0deg~+20.0deg |
| センササイズ | 55mm(L),15mm(W), 2.5mm(D) |
| 通信方式 | Ethernet UDP/IP |
| 電源電圧 | 5V |
※仕様は改善のため予告なく変更することがあります。
今回のサンプルについては、次のような課題意識をお持ちの事業者の皆様への提供を想定しております。
- ロボットハンドによるデリケート素材のピッキングに取り組みたい
- ロボットハンドによって従来の光学センサーでは扱えなかった作業に取り組みたい
- ロボットハンドの高価なカメラシステムの代替を検討したい
- ロボットハンドの小型化と知能化を同時に行える商品開発がしたい
- 自社工場のロボットハンドのティーチングコストを下げたい など
Thinkerでは今後、このサンプル提供を通じたお客様による現場での機能評価のフィードバックを受けて、近接覚センサーの製品化・量産に取り組んでまいります。
■機能評価用サンプルの提供について
サンプルの提供をご要望される方は、当社問い合わせアドレス(文末に記載)までご連絡ください。追って、担当者よりご連絡を差し上げます(多くのお問い合わせをいただいており、ご連絡に時間を要することもございますが、あらかじめご容赦いただきたくお願い申し上げます)。
なお、提供用のサンプルは、既存の環境での評価のしやすさを考慮し、ロボットハンドと制御基板との接続には汎用的な通信規格である「Ethernet UDP/IP」を採用しています。
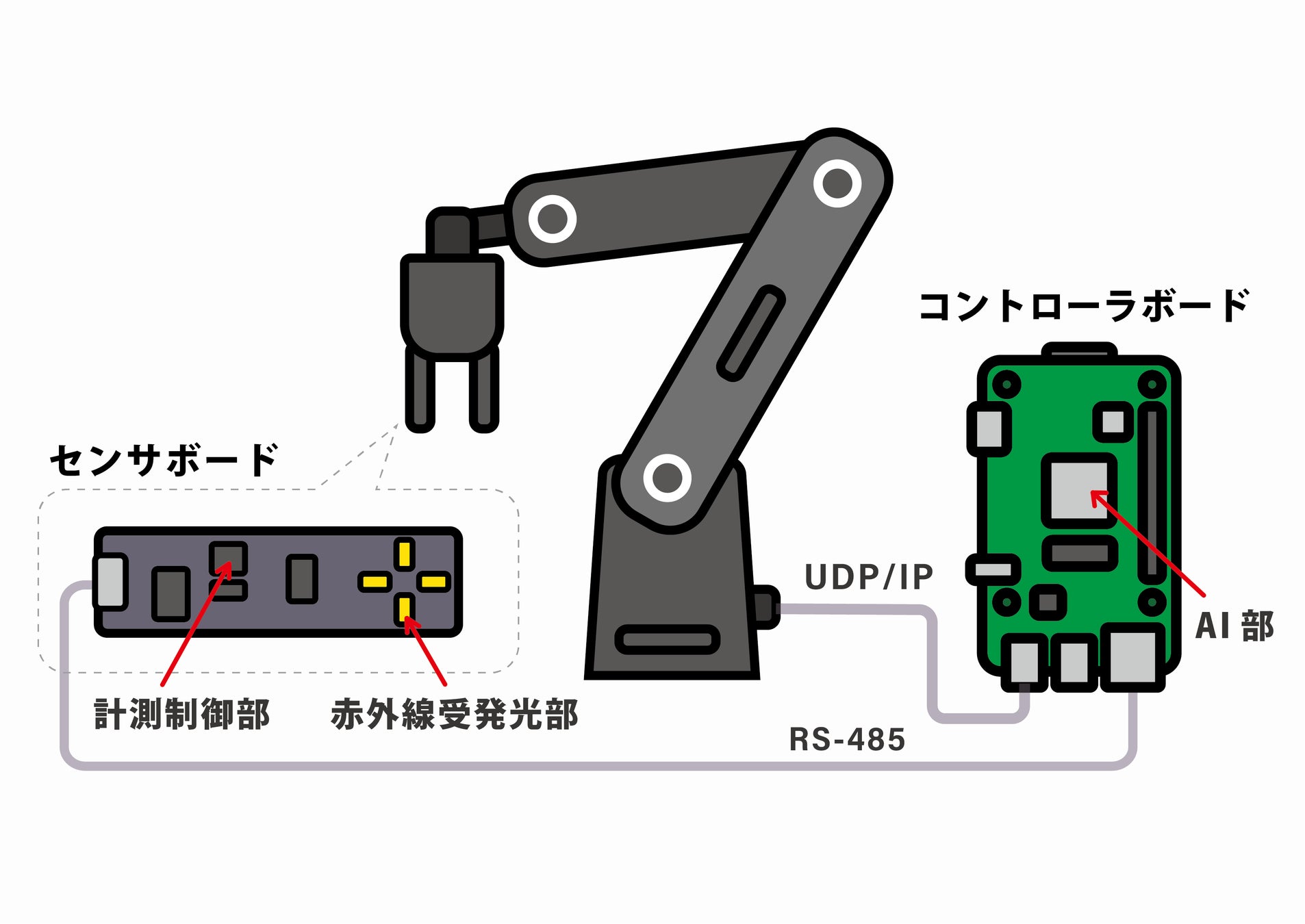
■近接覚センサーの概要
「近接覚」は、視覚とも触覚とも異なるモノの認知方法で、見たり、触ったりせずに認知することから「人間にはない感覚」とされています。大阪大学大学院基礎工学研究科システム創成専攻小山佳祐助教の技術シーズを基にしたThinkerの近接覚センサーは、対象物との距離と傾きを同時に計測する独自のセンシング技術により、死角部分を含めたモノの形状や鏡面・透明物質の認知を可能にしました。独自の高速・高精度AI技術と組み合わせることで、従来の産業用ロボットでは難しいとされていた現場に応じた臨機応変なピックアップが可能となるほか、ティーチング負担の軽減も促進します。

〇動く対象物をセンシングすることで把持部が追従する動画(YouTube):
https://www.youtube.com/watch?v=MtwL4D1kWuU
■会社概要
名称 : 株式会社Thinker
住所 : 〒541-0056 大阪府大阪市中央区久太郎町4丁目1−3 大阪センタービル6F-188
代表者 : 代表取締役兼CEO 藤本 弘道
設立 : 2022年8月
企業説明: 当社取締役であり、大阪大学大学院基礎工学研究科助教でもある小山佳祐が開発した「近接覚センサー」を活用したソリューション提案を行っています。当社の近接覚センサーは、距離と角度の同時計測を高度におこない、ガラスも鏡も認識するまでに進化し、器用なロボットハンドを実現してヒトと一緒に働く協働ロボットに革新を起こします。
備考 : 社名のThinkerには「考え抜く集団」「考えるロボット」「ロボットの進化(シンカ)を加速させる」といった思いを込めています。
■関連リンク
・動作時の死角を補う第六感センサー、独自のハードとAIで透明物体も逃さない
(日経クロステック 2022年9月13日)
https://xtech.nikkei.com/atcl/nxt/column/18/02183/00002/
・ロボットの視覚・触覚を補う“第六感”、阪大小山助教が開発「近接覚センサー」
(日経クロステック 2022年2月28日)
https://xtech.nikkei.com/atcl/nxt/mag/nmc/18/00011/00158/
・小山佳祐公式サイト
https://kk-hs-sa.website/
■株式会社Thinkerへのお問い合わせ
Eメール:info-web[at]thinker-robotics.co.jp
※[at]を@に変えて入力ください。