・深海における懸濁粒子数の時間変化を観測
・環境影響に配慮した深海における資源開発計画の立案に貢献
- 概 要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)地質調査総合センター地質情報研究部門 齋藤 直輝 研究員、Travis Washburn 産総研特別研究員(研究当時)、および鈴木 淳 研究グループ長らは、深海における資源開発の環境影響評価に向けて、AI(人工知能)技術を活用した懸濁粒子の観測手法を考案しました。
近年、深海における鉱物資源の開発が検討されています。深海では懸濁粒子のわずかな増加が生物に影響を及ぼす可能性があり、海底掘削や揚鉱水の排水に伴って発生する懸濁粒子による環境への影響が懸念されています。このため、資源開発の環境影響評価にあたっては、懸濁粒子の観測が重要です。しかし、既存の手法では深海の懸濁粒子を観測することは困難でした。本研究は、物体検出というAI技術を活用して、水中画像から懸濁粒子数の自動計測を実現しました。本研究により、資源開発に伴う懸濁粒子への影響の評価が可能になると期待されます。
この成果の詳細は、2023年7月11日(日本時間)に「Frontiers in Marine Science」に掲載されます。
下線部は【用語解説】参照
- 研究の社会的背景
近年、コバルトリッチクラストなどを対象に、深海における資源開発が世界各国で検討されています。コバルトリッチクラストとは、水深約1,000 m以深の海山において、基盤岩を厚さ数ミリメートル~数十センチメートルで覆うように分布する鉄マンガン酸化物です。希少金属であるコバルトやニッケル、白金などを含んでおり、潜在的な鉱物資源として注目されています。日本では経済産業省の主導のもと、鉱物資源の安定供給の観点から、日本周辺海域および公海における開発が検討されています。
深海における資源開発では、環境影響評価が重要です。資源開発に際して、海底掘削や揚鉱水の排水に伴って懸濁粒子が発生し、開発区域および周辺海域に拡散・再堆積する可能性があります。これにより、サンゴやカイメンなどの固着生物が埋められたり、ろ過摂食器官が詰まったりして、生態系に被害が及ぶことが懸念されています。大半の深海は自然状態での懸濁粒子が少ないため、わずかな増加でも生物に影響を及ぼす可能性があります。したがって、環境影響評価の基礎として、懸濁粒子を観測することが必要です。
しかし、従来の観測手法では、深海における微量な懸濁粒子の定量は困難です。例えば、濁度計などの光学センサーは、懸濁粒子からの反射光をもとに懸濁粒子濃度を測定します。しかし、懸濁粒子濃度が低い深海では、十分な反射光を得られず測定の精度が低いという問題があります。海水を採取して海水中の懸濁粒子濃度を直接測定するという手法もあります。しかし、深海の海水を採取するには時間がかかるため、短い時間間隔で深海の環境の変化を測定することは困難です。
- 研究の経緯
産総研は、独立行政法人 エネルギー・金属鉱物資源機構(JOGMEC)の主導のもと、コバルトリッチクラストの開発に向けた環境影響評価の研究に取り組んできました。今回、開発に伴って生じ得る懸濁粒子への影響を評価するために、新たな観測手法を考案しました。本研究は経済産業省の委託事業による成果です。
- 研究の内容
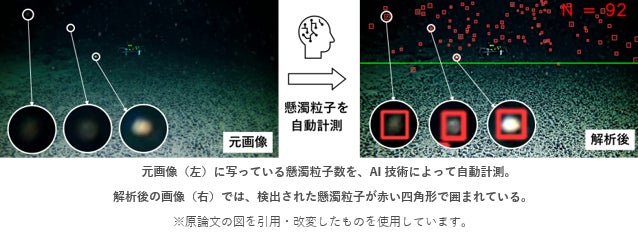
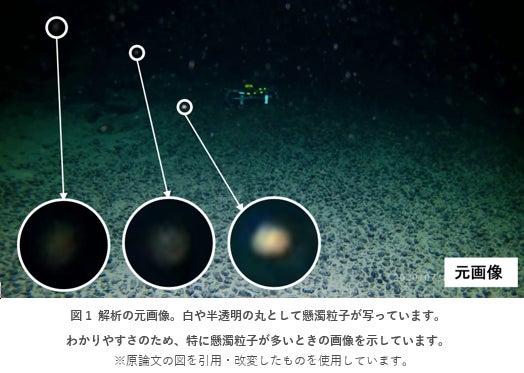
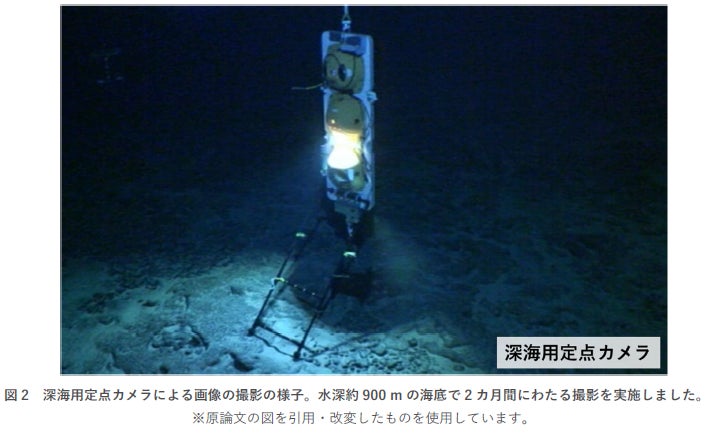
本研究は、懸濁粒子数を計測するために、AI技術の一つである物体検出を活用しました。物体検出は、画像中の特定の物体を自動的に識別し、位置を特定するためのコンピューターを用いた画像認識技術です。近年では、深層学習に基づくモデルが提案され、検出の精度と速度が飛躍的に向上しています。大量の画像を正確かつ迅速に処理・分析できるため、物体検出は海洋環境のモニタリングにも使われ始めています。例えば、魚などの海洋生物の個体数や、海洋ごみの個数の自動検出に応用されています。懸濁粒子は、水中画像においてカメラからの光を散乱して目立ちます(図1)。そのため、物体検出が比較的容易な対象ではないかと着想しました。本研究では、深層学習による高精度かつ高速な検出を行うために、物体検出モデルYOLOv5を用いました。深層学習と解析に用いる画像の撮影は、水深8,000 mまでの水圧に耐えられ、数カ月に及ぶ長期的な撮影が可能である深海用定点カメラ「江戸っ子1号」(岡本硝子株式会社)で行いました。得られた画像の一部を教師データとしてYOLOv5に入力し、懸濁粒子の特徴を自動的に抽出・学習させることで、懸濁粒子検出モデルを構築しました。教師データは3,484個の粒子を含む1,028枚の画像を用い、形状や明るさなど、多様な粒子のパターンをモデルに学習させました。
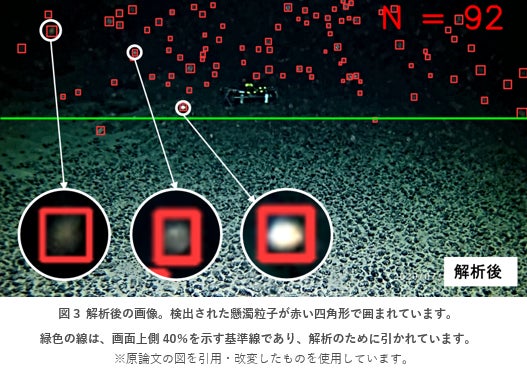
構築した懸濁粒子検出モデルにより、懸濁粒子数の自動計測を実施しました(図3)。解析後の画像(図3)の右上に表示されている「N = 92」は、検出された粒子の数が92個であることを示しています。元画像(図1)と解析後の画像では色味が違いますが、これは検出精度を向上させるための画像処理(エッジ保持平滑化フィルター)によるものです。モデルは、AP(平均適合率)およびF1値という、モデルによる予測が正解とどれだけ近いかを示す検出精度の指標で、100%中82%以上を記録しました。この検出精度は、海洋生物や海洋ごみを対象に物体検出を適用した先行研究の精度(> 80%、例えばSalman et al., 2020; Xue et al., 2021; Bonofiglio et al., 2022)と同程度であり、海洋環境のモニタリングのために十分な精度であると言えます。2カ月間の撮影で取得した6,753枚の画像にモデルを適用した結果、合計で23,913個の粒子が検出されました。これらの粒子についての統計的な解析により、懸濁粒子数が平均値と比べて10倍以上に急上昇するときがあることが明らかになりました。懸濁粒子数の平均値や時間変化といった基本的な知見は、今後、資源開発による懸濁粒子の影響を評価するための基礎となることが期待されます。
AI技術である物体検出モデルを用いた利点の一つは、手動での処理の手間を省けることです。他の画像解析手法、例えば輝度の閾値を設定して粒子を抽出する手法では、生物や海底を粒子として誤検出してしまう懸念があります。一方で物体検出モデルでは、粒子の特徴を学習したモデルで誤検出を自動的に避けることができました(図4)。これにより、手動で誤検出を確認し、誤検出を避けるための追加処理を行う手間を減らすことができました。

- 今後の予定
今後必要となる作業は、精度検証に使用する画像の多様性を拡大し、懸濁粒子検出モデルの検出限界を特定することです。検証すべきデータの例には、粒子径、懸濁粒子濃度、流速を含む幅広い環境条件があります。撮影条件に関しては、粒子の視認性に影響を与える照明に特に注意を払う必要があります。
将来的には、より多様な環境条件や撮影条件でも高精度で検出できるように、懸濁粒子検出モデルに学習させる画像を拡充する予定です。画像撮影は海洋観測の一般的な項目であるため、学習に用いることができる画像はすでに豊富に存在しています。懸濁粒子検出モデルにより、資源開発に伴う懸濁粒子への影響のデータ収集が可能となり、環境影響の観点からより望ましい開発計画の立案に貢献することが期待されます。
- 論文情報
掲載誌:Frontiers in Marine Science
論文タイトル:Using Deep Learning to Assess Temporal Changes of Suspended Particles in the Deep Sea
著者:Naoki Saito, Travis W. Washburn, Shinichiro Yano, and Atsushi Suzuki
DOI:10.3389/fmars.2023.1132500
- 用語解説
AI(人工知能 Artificial Intelligence)
一般に、コンピューターによって人間の問題解決能力と意思決定能力を模倣する技術のこと。その実現には、コンピューターが大量の入力データからパターンや関係性を自動的に学習して分析を行う手法である機械学習を用いることが多い。
揚鉱水
海底で採掘した鉱物を水中ポンプで洋上の母船へ運び揚げるために用いる海水のこと。
深層学習
機械学習の一分野。入力層と出力層の間に、多層の中間層を設けて学習する手法。生物の脳神経回路を模した数理モデルであるニューラルネットワークを用いることが多い。
YOLOv5
物体検出モデルYOLO (You Only Look Once)の第5世代。2020年6月に公開された。YOLOは、対象物の領域推定と分類を一つのネットワークで行うone-stage型の物体検出モデルであり、高精度かつ高速な検出を行うことができる。
教師データ
機械学習で用いる、モデルが学習するための正解ラベルを含むデータセット。
エッジ保存平滑化フィルター
画像処理において、対象物の輪郭線を保存しながら、それ以外の部分をノイズとして平滑化する手法。
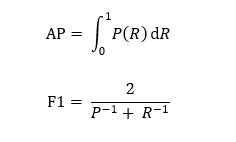
AP(平均適合率 Average Precision)・F1値(F1-Score)
ともに物体検出モデルの精度の評価指標。100%に近いほど精度が良いことを意味する。
検出されたもののうち正しいものの割合を示す適合率(Precision)をP、検出されたもののうち検出されるべきものの割合を示す再現率(Recall)をRとすると、APとF1(F1値)は以下のように定義される。
- 引用文献
・ Salman, A., Siddiqui, S. A., Shafait, F., Mian, A., Shortis, M. R., Khurshid, K., et al. (2020). Automatic fish detection in underwater videos by a deep neural network-based hybrid motion learning system. ICES J. Mar. Sci.77 (4), 1295–1307. DOI:10.1093/icesjms/fsz025
・ Xue, B., Huang, B., Wei, W., Chen, G., Li, H., Zhao, N., et al.(2021). An efficient deep-sea debris detection method using deep neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 14, 12348–12360. DOI:10.1109/JSTARS.2021.3130238
・ Bonofiglio, F., De Leo, F. C., Yee, C., Chatzievangelou, D., Aguzzi, J., and Marini, S. (2022). Machine learning applied to big data from marine cabled observatories: a case study of sablefish monitoring in the NE pacific. Front. Mar. Sci. 9. DOI:10.3389/fmars.2022.842946